工業以太網EtherCAT技術原理與網絡技術開發實現
工業以太網EtherCAT(以太網控制自動化技術)是一種高性能、實時性的工業通信協議,其設計目標是在標準以太網物理層上實現高速、精確的分布式控制。EtherCAT技術的核心原理與實現方式,為現代工業自動化系統的網絡技術開發提供了強大支撐。
一、EtherCAT技術基本原理
1. 實時通信機制:
EtherCAT采用“主從”架構,主站發送以太網幀,從站設備在數據幀經過時實時讀取或插入數據,實現“在線處理”。數據幀不被每個從站接收并重新組幀,而是以極小的延遲(通常小于1微秒)通過所有節點,大幅提升了通信效率。
2. 分布式時鐘同步:
EtherCAT通過精確的分布式時鐘機制,確保所有從站設備的時間同步精度可達納秒級。主站定期發送同步信號,各從站根據參考時鐘調整本地時鐘,從而支持高精度協同控制,如多軸運動控制。
3. 靈活的數據處理:
數據幀包含多個子報文,每個子報文對應特定從站或數據區。從站通過硬件實現數據提取與插入,無需CPU干預,減少了處理延遲,并支持多種數據類型和協議(如CANopen、PROFIBUS)的集成。
二、EtherCAT網絡技術開發實現
- 硬件平臺設計:
- 主站開發:通常基于工業PC或嵌入式系統,配備支持EtherCAT的網卡(如Intel千兆網卡搭配專用驅動)。主站軟件可采用開源棧(如SOEM)或商業棧(如Beckhoff TwinCAT),實現配置、診斷及實時任務調度。
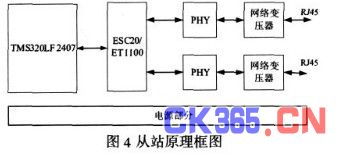
- 從站開發:從站設備需集成EtherCAT從站控制器(ESC),如ASIC芯片(如ET1100)或FPGA方案。ESC處理數據幀的物理層與數據鏈路層操作,確保實時性。開發者需設計硬件接口(如數字I/O、模擬量模塊)并與ESC集成。
- 軟件棧與協議棧開發:
- 主站軟件棧:實現EtherCAT主站協議,包括狀態機管理(Init、Pre-Operational、Safe-Operational、Operational)、郵箱通信(用于非實時參數配置)和過程數據交換(PDO)。開發中需優化實時線程,以滿足循環周期(通常為100μs–10ms)要求。
- 從站固件開發:基于ESC配置工具(如Beckhoff ESI文件),定義從站信息與數據映射。固件需實現應用層對象字典(遵循CoE規范),支持SDO(服務數據對象)訪問和PDO同步。
- 網絡配置與診斷工具:
- 使用XML格式的ESI(EtherCAT從站信息)文件描述從站功能,主站通過ENI(EtherCAT網絡信息)文件初始化網絡拓撲。
- 開發診斷工具監控網絡狀態,如鏈路質量、同步誤差及從站報警,利用EtherCAT的“工作計數器”機制檢測數據幀完整性。
- 實時性與性能優化:
- 采用實時操作系統(如Linux with PREEMPT_RT、Windows RTX)或專用實時內核,確保主站周期任務的確定性。
- 優化數據幀結構,減少冗余子報文,利用EtherCAT的“飛讀飛寫”特性最大化帶寬利用率(千兆以太網下可達90%以上)。
三、應用場景與開發挑戰
EtherCAT廣泛應用于運動控制、機器人、包裝機械等高精度領域。開發中需應對硬件成本、拓撲靈活性(支持線型、樹型或星型)及異構網絡集成等挑戰。隨著TSN(時間敏感網絡)技術的發展,EtherCAT over TSN將進一步增強其實時性與兼容性。
EtherCAT通過創新的實時以太網原理,結合模塊化的開發實現,為工業網絡技術提供了高效、可靠的解決方案。開發者需深入理解其協議棧與硬件協同設計,以充分發揮其在高速控制場景中的潛力。
如若轉載,請注明出處:http://m.99ea.cn/product/59.html
更新時間:2026-01-05 03:00:46